Due to the lapse in federal government funding, NASA is not updating this website. We sincerely regret this inconvenience.
Physics of the Cosmos spans the fields of high-energy astrophysics, cosmology, and fundamental physics, and includes a wide range of science goals. These include the following:
The discovery that the expansion of space is accelerating presents one of the most important scientific problems of our time. The implication that the universe is dominated by an unknown entity, now called "dark energy," that counters the attractive force of gravity, may revolutionize our understanding of cosmology and fundamental physics.
Read more » Expand our Knowledge of Dark Energy
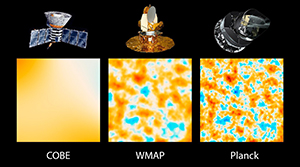
The cosmic microwave background (CMB) originated just 380,000 years after the Big Bang, when the Universe was dense, hot, and opaque. As the Universe cooled, the light was decoupled and escape from the matter. We observe that same light today, stretched by the expansion of the universe to a cold 2.7K glow. Observations of the CMB have driven our understanding of the early Universe, and are one of the few probes of the inflationary epoch.

Einstein's General Theory of Relativity is one of the most cherished fundamental theories of physics. But this description of gravity is widely expected to be incomplete because of its lack of a quantum foundation. The electromagnetic, weak, and strong forces, by contrast, are well defined by quantum mechanics. Most tests of General Relativity have been done in low gravitational fields, e.g., within the Solar System. However, the best tests would be in the most extreme conditions, near the event horizons of black holes, and where black holes are interacting at close range, particularly where velocities are an appreciable fraction of the speed of light.
Read more » Test the validity of Einstein's General Theory of Relativity and investigate the nature of spacetime

The massive black holes (~109 solar masses) ubiquitous in the Universe today are thought to stem from seed black holes formed early in the Reionization era. The origin of these seeds is uncertain. They may have formed from either large stellar mass black holes (~100 solar masses) left over from the first stars or intermediate mass black holes (~104–5 solar masses) formed directly by the collapse of supermassive gas clouds. Whether supermassive black holes grow through mergers or accretion, their host galaxies appear to have co-evolved with them.
Read more » Understand the formation and growth of massive black holes and their role in the evolution of galaxies

Cosmic rays, high-energy charged particles traveling at velocities that can approach the speed of light, are a rich potential probe of chemical and nuclear in the Universe. The majority of cosmic rays are atomic nuclei from hydrogen to the heaviest elements with energies spanning more than twelve orders of magnitude.
Read more » Explore the behavior of matter and energy in its most extreme environments